사남일녀 팀의 IoT 프로젝트 - 떡밥밥
![]()
![]()

시스템 구현 배경
1인가구가 점차 증가하는 요즘,
사람들은 외로움을 달래기 위해 비용이 저렴하고, 손이 덜 가는 물고기를 많이 키우고 있습니다.
이러한 가운데 업무로 인해 장기간 집을 떠나거나 갑작스럽게 출장을 가야 할 경우가 생기게 됩니다.
이러한 곤란한 문제를 해결하기 위해 만든 프로젝트입니다.
개발 목표
- 플랫폼에 종속되지 않는 앱 개발.
- 소프트웨어와 하드웨어의 연동.
- WiFi 통신을 이용하여 원격지에서도 소프트웨어를 통해 하드웨어를 조작.
주요 기능
- 먹이주기
- 앱에서 버튼을 누르면 아두이노가 수동으로 먹이를 줌.
- 앱에서 먹이 줄 시간을 지정하면 해당 시간에 아두이노가 자동으로 먹이를 줌.
- 앱에서 대기 시간을 지정하면 먹이를 줄 때 해당 시간만큼 아두이노의 모터가 대기해 먹이의 양을 조절.
- 수온 관리
- 일정 시간 마다 현재 수온을 업데이트.
- 수온에 따른 히터 ON/OFF, 프로젝트와 별개로 히터 자체에서 제공.
- 조명 관리
- 앱에서 버튼을 누르면 아두이노가 수동으로 조명을 켜고 끌 수 있음.
- 앱에서 시간을 지정하면 해당 시간에 맞춰 아두이노가 자동으로 조명을 켜고 끔.
시연 동영상 (클릭하면 유튜브로 이동)





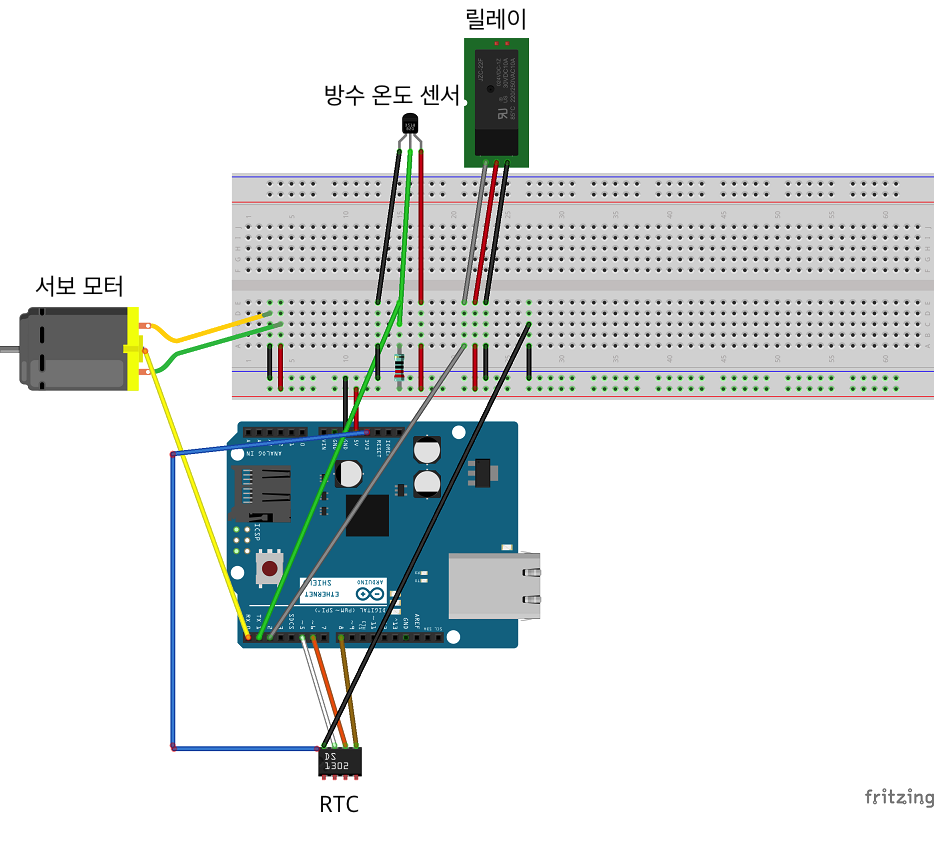
아두이노 회로도
스펙
- Arduino 101(Genuino 101) - 다양한 센서모듈을 이용한 조작이 가능한 하드웨어
- AngularJS 1 - 싱글 페이지 어플리케이션 제작을 위해 구글에서 만든 자바스크립트 프레임워크
- Dothome 무료 호스팅 - Apache 2.4(Web Server), PHP5.5(Server Side Script), MySQL 5.1(DBMS)
사용한 언어는 다음과 같습니다.
- C++ - 아두이노에 심을 프로그램을 코딩할 때 쓰임.
- ECMAScript 5(JavaScript) - 웹 브라우저에서 돌아가는 어플리케이션을 코딩할 때 쓰임.
- PHP 5.5 - DB 서버와 통신하기 위해 쓰임.
베타 버전은 해당 링크에서 확인 가능합니다.
스마트폰에서 정상적으로 보이며, PC에서 볼 경우에는 모바일 모드로 보실 것을 권장합니다.
아두이노에 사용한 모듈들은 다음과 같습니다.
- 와이파이 쉴드(TEL0064) - 아두이노가 와이파이 통신을 하기 위한 모듈
- 방수 온도 센서(DS18B20) - 수온을 재기 위한 모듈
- Real Time Clock(DS1302) - 현재 시간을 알아내기 위한 모듈
- 릴레이(SRD-05VDC-SL-C) - 조명의 전원 공급/차단을 위한 모듈
- 서보 모터(Servo – Generic) - 먹이통을 제어하기 위한 모듈
사전에 설치해야할 사항
이 프로젝트를 개발하기 위해서는 아래와 같은 내용들이 설치돼있어야 합니다.
- Arduino IDE - 아두이노 프로그램 코딩을 위한 툴.
- OneWire - 아두이노에서 수온 센서를 위한 라이브러리.
- DS1302 - 아두이노에서 리얼 타임 센서를 위한 라이브러리.
- Apach 2.4 - PHP 5.5+와의 연동을 위해 필요한 웹 서버이다.
- PHP 5.5 - DB 서버와의 연동을 위해 필요한 서버 사이드 스크립트 언어이다.
- MySQL 5.1 - 아두이노, 사용자 정보 등등의 정보를 저장하기 위한 DBMS이다.
- Node.js - npm을 사용하려면 필수이다.
- npm - Node.js에서 사용되는 모듈을 패키지로 모아놓은 곳
- Bower - 웹 프론트 엔드 개발의 의존성 관리를 위한 패키지 관리자
- Git - Bower를 통해 컴포넌트를 설치하기 위해서 필요하다.
- Gulp - 빌드 자동화 도구
프로젝트 설치하기
이제 이 프로젝트를 사용할 준비가 끝난 것입니다.
그럼 이제 이 프로젝트를 자신의 컴퓨터에 다운받도록 합니다.
터미널(명령 프롬프트)을 열어 프로젝트 디렉토리로 이동한 후에
$ git clone https://github.com/perfectacle/fish
를 입력하면 프로젝트 내에 fish 디렉토리가 생성되며
현재 프로젝트의 파일들이 모두 복사됩니다.
참고로 dummy 폴더의 내용은 개발과는 전혀 상관 없으므로 삭제하셔도 무방합니다.
이제 터미널 상에서 fish 디렉토리로 이동해주도록 합시다.
웹 어플리케이션 개발 환경 구축하기
이제 컴포넌트를 설치할 차례입니다.
$ npm i
$ bower i
를 입력하여 개발 시에만 사용할 컴포넌트,
배포 시에도 사용할 컴포넌트를 프로젝트 내에 설치하시면 됩니다.
DB 구축하기
DB를 구축하시려면 아래 파일의 쿼리문을 실행시키면 됩니다.
/sql/db.sql
아두이노 개발 환경 구축하기
아두이노 IDE를 설치하신 후에 OneWire와 DS1302 라이브러리를
아두이노가 설치된 디렉토리로 가서
Arduino\libraries
폴더에 추가하시면 됩니다.
프로젝트 개발하기
이제 실제로 프로젝트를 개발해볼 차례입니다.
Arduino IDE, npm&Bower와 Gulp의 사용법은 설명하지 않도록 하겠습니다.
해당 내용들은 다른 문서들을 통해 찾아보시기 바랍니다.
gulpfile.js에 주석을 넣어놓았으므로 빌드를 고치실 분은 참고하시기 바랍니다.
웹 어플리케이션 개발하기
개발을 진행하실 때는 아래와 같은 명령어를 입력한 후 개발을 진행하시면,
생산성 향상에 도움이 될 것입니다.
$ gulp
위 명령어를 입력한 후에 개발을 진행하시면,
SCSS 파일의 변화를 자동으로 감지하여 CSS 파일로 컴파일 해줍니다.
/www/src
위 디렉토리는 개발용 디렉토리입니다.
개발을 모두 마치고, 실제 배포를 위한 테스트를 진행하실 때는
$ gulp build
위 명령어를 입력하면
/www/public
위 디렉토리가 생성됩니다.
위 디렉토리는 실제 배포용 디렉토리입니다.
주석의 제거, 컴포넌트(CSS, JS)파일을 하나로 통합, 각종 파일(CSS, JS, 이미지 파일) 압축
등등의 작업을 진행해 용량을 최소화 시키는 등의 작업을 거쳐 앱의 퍼포먼스를 증대시켜줍니다.
server/#/time
페이지로 이동하시면 현재 아두이노의 시간을 확인하실 수 있습니다.
아두이노 개발하기
기본 문법은 C/C++을 따르며 Arduino IDE로 해당 소스 파일을 여신 후에 코딩하시면 됩니다.
컴파일을 마치신 후에 아두이노의 USB와 컴퓨터를 연결한 후에 컴파일한 파일을 업로드 하시면 됩니다.
/arduino/fish.ino
파일은 시리얼 통신을 하기 때문에 전원이 공급된 이후에도 시리얼 모니터를 켜야 정상 작동합니다.
시리얼 모니터에 로그가 다 찍히기 때문에 디버깅하기에 수월한 소스입니다.
시리얼 통신을 하지 않으시려고 하거나 따로 전원을 공급하시려는 분들은
소스 코드의 주석을 참고해주시기 바랍니다.
내부(사설) IP 사용하기 (포트 개방이 불가능할 경우)
내부 IP는 동일한 네트워크 사이에서만 접근 가능한 IP입니다.
즉 다른 네트워크(AP, 와이파이)를 사용하는 경우에는 서로 통신이 불가능합니다.
이 경우에는 공유기의 관리자 권한으로 접근이 불가능하거나
특정 포트의 사용이 불가능하여 불가피하게 테스트의 목적으로만 사용할 것을 권장합니다.
/www/src/scripts/app.js
파일을 여신 후에
$rootScope.arduino = 'http://' + data['p_ip'] + ':' + data['port'];
이 부분을 아래와 같이 고쳐주시면 됩니다.
$rootScope.arduino = 'http://' + data['l_ip'] + ':' + data['port'];
외부(공인) IP 사용하기 (포트 개방이 가능할 경우)
외부 IP는 동일한 네트워크가 아니더라도 접근 가능한 IP입니다.
즉 다른 네트워크(AP, 와이파이)를 사용하는 경우에도 서로 통신이 가능합니다.
아두이노는 와이파이에 연결시켜놓고, 핸드폰은 LTE 네트워크를 써도 서로간에 통신이 가능합니다.
권장드리는 방안이며, 기본 설정입니다.
필수적으로 공유기 관리 페이지로 가셔서 해당 포트를 꼭 개방시켜놓아야합니다.
혹여 내부 IP 방식으로 수정하셨던 분들은 아래 설명을 따라 하시면 됩니다.
/www/src/scripts/app.js
파일을 여신 후에
$rootScope.arduino = 'http://' + data['l_ip'] + ':' + data['port'];
이 부분을 아래와 같이 고쳐주시면 됩니다.
$rootScope.arduino = 'http://' + data['p_ip'] + ':' + data['port'];
마치며
B/G 모드만 지원하는 와이파이 쉴드를 구매해서 통신에 부적합한 것을 뒤늦게 깨달아
다소 완성도가 떨어지는 점도 존재합니다.(새로고침 한 이후에 데이터가 제대로 안 간다던지 등등)
차후에 와이파이를 이용한 프로젝트는 좀 더 저렴하고 기타 부품들이 덜 필요한 라즈베리 파이를 이용해야 할 것 같습니다.
문서와 프로젝트가 많이 부족하니 피드백은 아래 메일로 부탁드립니다.